If you’re working on the next generation of humanoid robots, you probably already know one thing: everything comes down to how accurately those joints can actually know where they are.
The motors can be super powerful, the algorithms can be fancy, but if the position feedback is off by even 0.05 degrees on an elbow or hip joint… your robot will look shaky, hesitant, or just plain uncanny.
That’s where optical encoder sensors really shine.
Today I’m gonna walk you through why optical encoders have become the go-to choice for serious humanoid development teams who need rock-solid robotics motor control and position sensing, what really matters when you’re choosing one, and some practical stuff we’ve seen work (and not work) in real projects.
Why Humanoid Robots Are So Picky About Position Feedback
Humanoids aren’t like industrial arms that repeat the same motion a thousand times a day in a nice clean environment.
They need to:
- Walk on uneven ground without falling
- Grasp soft objects without crushing them
- Do meaningful hand gestures during conversation
- Balance while carrying different payloads
- Switch between walking, squatting, climbing stairs, etc.
All of these require joint position accuracy typically in the range of 0.01°~0.05° (depending on joint size and reduction ratio), and very low position noise.
Most teams quickly find out that magnetic encoders (even the good 14-16 bit ones) start showing noticeable jitter and temperature drift when you push for that level of resolution on a compact harmonic-drive joint.
Optical encoder sensors solve many of these headaches because they read patterns using light instead of magnetic fields.

Si PIN photodiode PDCP08 Series PDCP08-502
The PDCP08-502 is a high-response 2.9×2.8mm Silicon PIN Photodiode designed for precision photoelectric applications. Featuring low junction capacitance, low dark current, and a wide spectral range (340-1100nm), it is the ideal component for optical switches and compact sensing modules requiring stable and fast signal output.
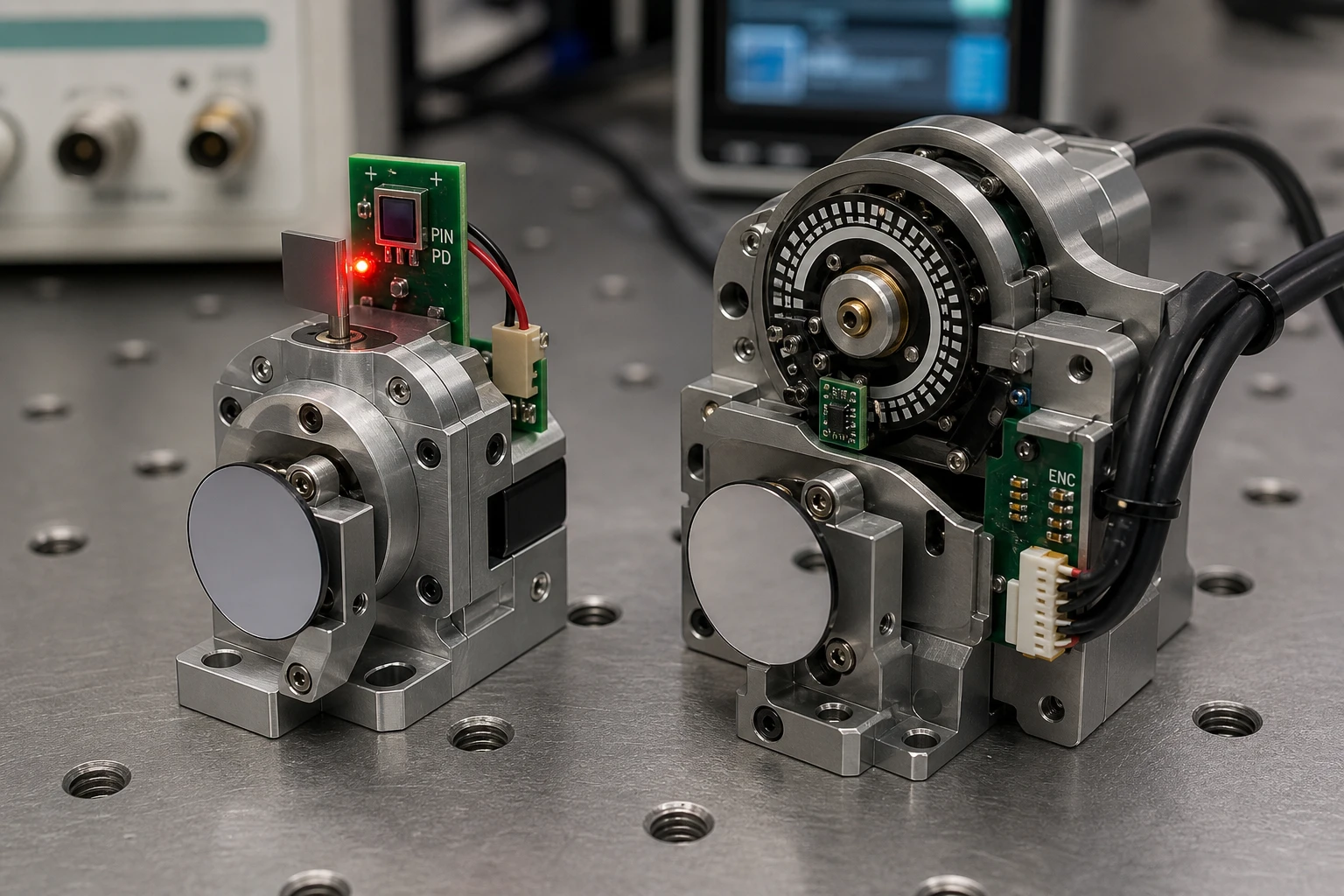
How Optical Encoders Actually Work (the simple version)
At the heart of it, you’ve got a code disk (glass or sometimes high-end plastic) with very precise engraved or printed patterns – usually alternating transparent and opaque lines.
A LED shines light through (or reflects off) the disk, and on the other side (or same side for reflective types) there’s an array of photo-detectors picking up the light/dark pattern.
Modern high-end ones use interpolation electronics to squeeze way more resolution out of the basic line count.
Common incremental optical encoders these days start with 5000–20000 physical lines, then with ×4 quadrature + interpolation you easily get 19–22 bit effective resolution.
For absolute optical encoders it’s a bit different – they usually have multiple concentric tracks (Gray code + fine track) or use complicated pseudo-random codes.
Optical vs Magnetic vs Capacitive – Quick Comparison Table
| Feature | Optical Encoder | Magnetic Encoder | Capacitive Encoder |
|---|---|---|---|
| Typical resolution (bits) | 19–24 bit | 12–18 bit | 16–20 bit |
| Position noise / jitter | Very low | Medium–High | Low–Medium |
| Temperature drift | Excellent (±5 ppm/°C common) | Noticeable (50–150 ppm/°C) | Good |
| Sensitivity to external mag field | None | Very high | Low |
| Sensitivity to dust/oil | Medium–High (needs sealing) | Very low | Medium |
| Size for same resolution | Larger | Smaller | Medium |
| Cost for 20+ bit resolution | $$$ | $ | $$ |
| Best for humanoid joint | High-end torque-dense joints | Cost-sensitive / dirty env | Mid-range applications |
From what we’ve seen in actual humanoid projects, once you go above ~18.5 effective bits and need consistent performance across -10°C to +60°C, optical usually wins.
Si PIN Photodiode Array Four-quadrant PD PDCA04-102
Looking for a high-performance B2B Si PIN Photodiode Array for precision sensing? The PDCA04-102 is a premium four-quadrant detector designed for industrial OEM applications. Featuring a robust 16.5×14.5mm package with four large 5×5mm photosensitive elements, this array delivers exceptional consistency and sensitivity for position detection and laser alignment systems. Partner with Bee Photon for reliable bulk manufacturing and custom solutions.
Key Specs You Should Really Care About for Humanoid Joints
Here are the things that bite teams the most often:
- Effective bits after interpolation & noise
Don’t just look at marketing “24-bit”. Look at RMS noise in arc-seconds or the actual position repeatability spec. - Signal interpolation method
Analog sine/cosine interpolation usually beats digital subdivision for low jitter. - Hysteresis
Some optical encoders show 1–3 arc-sec hysteresis because of bearing play or disk eccentricity. Good ones keep it under 0.8 arc-sec. - Axial / radial runout tolerance
Humanoid joints move around a lot. Cheap encoders fail fast when shaft wobbles 0.02 mm. - Maximum speed vs resolution trade-off
Many 22-bit optical encoders drop to 19–20 bit effective at >3000 rpm. Your harmonic drive ratio is probably 80–120:1, so motor speed can get high during fast motions. - Absolute vs Incremental + battery backup
For humanoids that need to be power-cycled often, absolute is becoming preferred.
Real-World Examples We’ve Seen Work Well
I can’t share customer names, but here are a few anonymized patterns that keep showing up:
- Full-size (160–185 cm) bipedal research platform
Used 22-bit absolute optical encoders on all 12 leg/arm joints. Result: walking gait tuning time dropped from 9 months to about 3.5 months because position data was so clean. - Medium size (120 cm) service humanoid for hotel deployment
Tried high-end magnetic → switched to optical on shoulder & elbow after guests complained about “shaky handshakes”. Problem basically disappeared. - Humanoid hand with 20+ DoF
Finger joints used miniature 19-bit incremental optical encoders with custom glass code disks Ø11 mm. Tactile + position fusion became much more reliable.
Common Pain Points & How Good Optical Encoders Fix Them
- Temperature changes during long operation
Good optical encoders change less than 5 arc-sec across 50°C delta. Many magnetic ones drift 30–80 arc-sec. - EMI from high-current servo drives
Optical is completely immune (no magnetic pickup). - Vibration induced count loss
Modern LED + photo-detector designs with differential signals handle vibration much better than 10 years ago. - Long cable runs
RS-422 differential output can go 20+ meters without quality loss.
Choosing the Right Optical Encoder for Your Project
If you’re serious about precision humanoid joints, here’s a rough decision tree we usually run through:
- Need absolute position after power loss → go absolute optical
- Budget is very tight and environment is clean → maybe high-end magnetic
- Want the cleanest possible position signal and can afford the size/price → optical incremental or absolute
- Joint diameter < Ø18 mm → special micro optical becomes very expensive, look at custom solutions
At Bee Photon we focus exactly on that last category – high-precision optical encoder sensors that are small enough and clean enough for the newest generation of torque-dense humanoid joints.
You can check our main offerings here: https://photo-detector.com/

Si PIN Photodiode with scintillantor PDCD34-102
Bee Photon’s Si PIN photodiodes with scintillator deliver superior X-ray and gamma-ray detection.Our GOS scintillator photodiode ensures high light output and minimal afterglow for precise imaging.
Ready to Talk About Your Joint Control Challenges?
If you’re currently battling jittery trajectories, temperature-related drift, or just want your position sensing to stop being the bottleneck in your humanoid project, drop us a line.
We love geeking out over joint-level control problems.
→ Contact page: https://photo-detector.com/contact-us/
→ Email: info@photo-detector.com
No pressure, just honest conversation about what might actually move your project forward.
FAQ
Q1: Are optical encoder sensors really worth the extra cost compared to good magnetic ones?
For most mid-range humanoids, maybe not. But once you push for sub-0.03° accuracy on shoulder/elbow/hip joints with harmonic drives, the difference in tuning time and final motion quality is usually very noticeable. Many teams who first said “too expensive” came back after 6–12 months of frustration.
Q2: How small can a high-resolution optical encoder actually get for finger joints?
Right now the sweet spot for reliable 19+ bit optical is around Ø13–18 mm. Smaller than that and you usually sacrifice either resolution, signal quality, or long-term reliability. We have a few custom Ø11 mm prototypes running in labs though.
Q3: Do I need absolute encoders or is incremental + homing good enough?
Depends on your use-case. If the robot is allowed to do a homing routine every time it powers on (like many research platforms), incremental is fine and usually cheaper. If you want instant readiness after power-up (customer-facing service robots), absolute saves a lot of headaches.