Robotik und Automatisierungssteuerung waren früher sehr viel einfacher. Man musste nur eine Last von Punkt A nach Punkt B bringen, ohne gegen eine Wand zu fahren. Aber heute? Wenn Ihr Servomotor auch nur um den Bruchteil eines Grades daneben liegt, haben Sie ein verschrottetes Teil oder ein völlig verstopftes Fließband.
Ich beschäftige mich seit Jahren mit Automatisierungssteuerungen und Motor-Feedback-Sensoren, und es erstaunt mich immer wieder, wie viele Ingenieure gerade bei den Komponenten sparen, die ihrem System sagen, wo es eigentlich steht. Sie können den teuersten Servoantrieb der Welt haben, aber wenn Ihre Motor-Feedback-Sensoren Mülldaten liefern, wird Ihr System wie Müll laufen.
Lassen Sie uns eine Sache gleich zu Beginn klarstellen. In der Branche gibt es derzeit eine große Debatte über magnetische und optische Systeme. Viele Leute werden Ihnen sagen, dass magnetische Drehgeber die Zukunft sind, weil sie Schmutz und starke Vibrationen gut vertragen. Ganz ehrlich? Ich denke, dass magnetische Motorfeedback-Sensoren massiv überbewertet werden, wenn man ein wirklich hochpräzises Robotergelenk bauen will. Sicher, sie sind robust, aber wenn es um die Positionierung im Submillimeterbereich geht, kann man die reine, unverfälschte Genauigkeit eines optischen Gebermoduls einfach nicht übertreffen.
In diesem Leitfaden erkläre ich Ihnen, wie Sie Ihre Motorfeedback-Sensoren genau spezifizieren, wie Sie die schmutzige Mathematik hinter der Auflösung verstehen und warum die Aufrüstung Ihrer Automatisierungssteuerungshardware der einfachste Cheat-Code für eine bessere Maschinenleistung ist.
Die wirkliche Rolle von Motor-Feedback-Sensoren in der Automatisierungssteuerung
Um zu verstehen, warum das so wichtig ist, muss man sich ansehen, wie die Automatisierungssteuerung eigentlich funktioniert. Ein Servomotor dreht sich nicht einfach blindlings. Er beruht auf einem geschlossenen Regelkreis. Die Steuerung sendet einen Bewegungsbefehl, der Motor bewegt sich, und dann melden die Rückkopplungssensoren des Motors genau zurück, wie weit er sich tatsächlich bewegt hat.
Wenn es eine Differenz zwischen der befohlenen und der tatsächlichen Position gibt, passt der Controller den Strom an, um das Problem zu beheben. Diese kontinuierliche Schleife läuft Tausende von Malen pro Sekunde ab. Aber jetzt kommt der Knackpunkt: Der Controller weiß nur, was die Motorfeedback-Sensoren ihm mitteilen. Wenn Ihre Motorfeedback-Sensoren eine Verzögerung aufweisen, eine niedrige Auflösung haben oder elektrisches Rauschen auffangen, nimmt die Steuerung falsche Einstellungen vor. Dies führt zu Jitter, Überhitzung und einer schlampigen Automatisierungssteuerung.
Bei der Herstellung von Robotergelenkmodulen erwarten Ihre Kunden eine Wiederholgenauigkeit im Submillimeterbereich. Das lässt sich mit einfachen Motorfeedback-Sensoren nicht erreichen. Sie brauchen Komponenten, die hohe Geschwindigkeit, unglaubliche Auflösung und felsenfeste Zuverlässigkeit bieten.
Si-PIN-Fotodioden-Array PDCA02-102
Die PDCA02-102 ist eine leistungsstarke Si-PIN-Photodioden-Array entwickelt für optische Präzisionsmess- und Ausrichtsysteme. Entwickelt von Bee Photon, ist dieses 2-Segment-Fotodiode liefert einen breiten Spektralbereich von 400nm bis 1100nm, die das gesamte Spektrum des sichtbaren Lichts bis in den Nahinfrarotbereich (NIR) abdecken.
Mit seinem kompakten COB-Gehäuse (Chip on Board) und dem Harzfenster gewährleistet der PDCA02-102 Langlebigkeit und eine einfache Integration in kompakte optische Module. Er ist speziell für industrielle Anwendungen optimiert, bei denen hohe Empfindlichkeit und schnelle Reaktionszeiten entscheidend sind.
Warum ein optisches Encoder-Modul für Präzision sorgt
Warum setze ich mich also so sehr für optische Motorfeedback-Sensoren ein und nicht für magnetische? Das ist eine Frage der Physik.
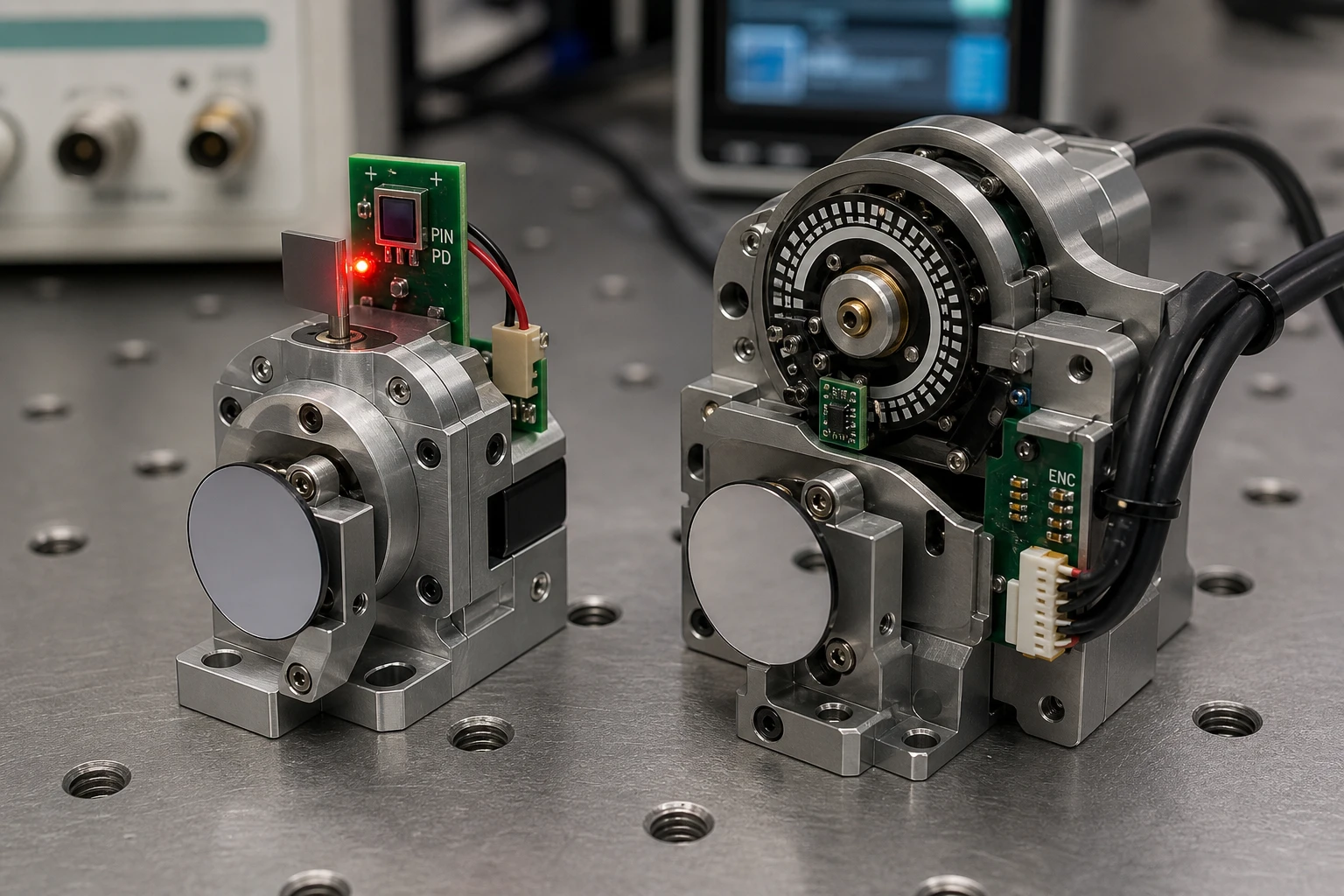
Im Inneren eines optischen Encoder-Moduls befinden sich eine LED-Lichtquelle, eine transparente Scheibe mit winzigen aufgedruckten undurchsichtigen Linien (das Codierrad) und ein Empfänger auf der anderen Seite. Wenn sich die Motorwelle dreht, dreht sich die Scheibe mit. Die Linien unterbrechen den Lichtstrahl. Der Empfänger fängt diese Lichtblitze auf und wandelt sie in elektrische Impulse um.
Da wir diese Linien mit Hilfe der Fotolithografie mikroskopisch dicht nebeneinander drucken können, kann ein optisches Encoder-Modul wahnsinnig hohe native Auflösungen erreichen. Ich spreche hier von mehr als 10.000 Impulsen pro Umdrehung (PPR), und das ohne jegliche digitale Tricks. Magnetische Motor-Feedback-Sensoren beruhen auf dem Erfassen der wechselnden Pole eines Magneten, was gut ist, aber die physikalischen Grenzen der Magnetisierung einer Scheibe bedeuten, dass man natürlich an eine Wand stößt, wenn man versucht, die Auflösung zu erhöhen.
Die geheime Sauce in jedem optischen High-End-Encoder-Modul ist der Empfänger. Wenn der Empfänger langsam ist, kommt es zu Engpässen im gesamten System. Deshalb ist bei BeePhoton, integrieren wir unsere ultraschnellen Si-PIN-Fotodioden in diese Systeme. Diese speziellen Fotodioden verfügen über die erforderliche Bandbreite, um Hochgeschwindigkeits-Lichtimpulse zu erfassen, ohne dass die Zählung abfällt, selbst wenn der Motor in einer anspruchsvollen Automatisierungsumgebung mit 5000 U/min aufheult.
Die Mathematik hinter Motor-Feedback-Sensoren (kein Doktortitel erforderlich)
Viele Ingenieure lassen sich von der Mathematik einschüchtern, die für die Spezifizierung von Motorfeedback-Sensoren verwendet wird, aber eigentlich ist es nur einfache Algebra. Sie müssen nur Ihre mechanische Geschwindigkeit mit Ihrer elektrischen Bandbreite abgleichen.
1. Berechnung der maximalen Geberauflösung
Bei inkrementalen Motorfeedback-Sensoren hat die interne Elektronik einen maximalen Frequenzgang. Dies ist die absolute Drehzahlgrenze, bei der der Sensor Lichtimpulse verarbeiten kann. Wenn Sie den Motor zu schnell drehen, überlastet das optische Encoder-Modul seinen Prozessor, verschlechtert das Signal und es kommt zu kumulativen Positionierungsfehlern.
Hier ist die goldene Formel, mit der Sie sicherstellen, dass Ihre Motorfeedback-Sensoren Ihr Automatisierungssteuerungssystem nicht zum Flaschenhals machen:
Maximale Geberauflösung (PPR) = (Betriebsfrequenz * 60) / Max RPM
Nehmen wir ein Beispiel aus der Praxis. Nehmen wir an, Sie haben ein optisches Encoder-Modul mit einem Frequenzgang von 100 kHz (das sind 100.000 Hz) und Ihr Servomotor muss eine mechanische Geschwindigkeit von 3.000 U/min erreichen.
Maximale Auflösung = (100.000 * 60) / 3.000
Maximale Auflösung = 6.000.000 / 3.000 = 2.000 PPR.
Wenn Sie versuchen, eine 2500 PPR-Scheibe in dieses spezielle System einzubauen, werden Ihre Motorrückkopplungssensoren bei 2400 RPM ihr Maximum erreichen. Der Motor wird sich bis 3000 U/min weiterdrehen, aber das Automatisierungssystem wird für die oberen 600 U/min völlig blind sein. Führen Sie diese Berechnungen immer durch, bevor Sie Motorfeedback-Sensoren kaufen.
2. Auflösung Multiplikation (Der X4 Cheat Code)
Wenn Ihre Standard-Motorfeedback-Sensoren nicht über eine ausreichende native Auflösung für Ihr Robotergelenk verfügen, müssen Sie nicht unbedingt ein teureres optisches Encoder-Modul kaufen. Sie können die Auflösungsmultiplikation durch Ihre SPS oder Ihren Antrieb nutzen.
Die meisten inkrementalen Motorfeedback-Sensoren geben zwei Signale aus: Kanal A und Kanal B. Diese sind um 90 elektrische Grad verschoben (dies wird als Quadratur bezeichnet).
- Wenn Ihre Automatisierungssteuerung nur die steigende Flanke von Kanal A zählt, ist das eine X1-Kodierung.
- Wenn die ansteigende und abfallende Flanke von Kanal A gezählt wird, handelt es sich um X2-Codierung (Verdoppelung der Auflösung).
- Wenn er die steigenden und fallenden Flanken von BEIDEN Kanälen A und B zählt, ist das eine X4-Codierung.
Wenn Sie also Standard-Motorfeedback-Sensoren mit 1.000 PPR kaufen, erhalten Sie mit der X4-Kodierung sofort 4.000 Impulse pro Umdrehung, mit denen Ihr Automatisierungssteuerungssystem arbeiten kann.
3. Formel für die Encoder-Genauigkeit
Denken Sie daran, dass die Auflösung nur angibt, in wie viele Scheiben der Kuchen geschnitten wird. Die Genauigkeit gibt an, ob diese Scheiben tatsächlich die richtige Größe haben. Die Genauigkeit Ihrer Motorfeedback-Sensoren wird einfach berechnet durch:
Drehgeber-Genauigkeit = | tatsächliche mechanische Position - gemeldete Sensorposition |
Selbst das beste optische Gebermodul weist leichte Fehler auf. Mechanische Fehlausrichtung ist hier der größte Killer. Wenn Ihre Motorfeedback-Sensoren mit einer Winkelabweichung von mehr als ±0,5 Grad montiert sind, entsteht ein sinusförmiger Positionsfehler, der die Präzision Ihrer Automatisierungssteuerung ruiniert.
Si-PIN-Photodioden-Array PDCA02-601
Die Bee Photon PDCA-Serie ist ein präzisionsgefertigtes Doppel-PIN-Fotodiode entwickelt für die industrielle High-End-Sensorik. Im Gegensatz zu herkömmlichen Einzelelement-Detektoren verfügt dieses auf Silizium basierende Gerät über eine segmentierte Array-Struktur (PD A und PD B), was es zur perfekten Lösung für differentielle Messungen und optische Schalter mit Hintergrundausblendung. Mit einem breiten Spektralbereich von 350nm bis 1060nm gewährleistet es eine vielseitige Leistung im sichtbaren und nahen infraroten Wellenlängenbereich.
Umgang mit Rauschen und Ausrichtungsfehlern in Motorfeedback-Sensoren
Ich habe das schon hundertmal in der Fabrikhalle gesehen. Ein Unternehmen gibt viel Geld für hochwertige Motor-Feedback-Sensoren aus, schraubt sie an das Servo und wundert sich dann, warum das Automatisierungssteuerungssystem Fehlercodes ausgibt.
Montage-Toleranz:
Beim Einbau eines optischen Encoder-Moduls ist eine Montagegenauigkeit von ±0,05 mm absolut entscheidend. Wenn die Scheibe nicht perfekt konzentrisch zur Motorwelle ist, trifft das Licht der LED nicht perfekt auf die Si-PIN-Fotodioden. Dies erzeugt ein wackeliges Signal. Ihre Motor-Feedback-Sensoren melden, dass der Motor während einer einzigen Umdrehung schneller und langsamer wird, selbst wenn er sich mit einer vollkommen konstanten Geschwindigkeit dreht.
Elektromagnetische Interferenz (EMI):
Motorfeedback-Sensoren befinden sich in der Regel direkt neben massiven, lauten Stromkabeln, die den Servomotor versorgen. Diese EMI kann zu falschen Impulsen in den Sensorkabeln führen. Um dem entgegenzuwirken, verwenden Sie immer abgeschirmte, paarweise verdrillte Kabel für Ihre Motorfeedback-Sensoren. Erden Sie die Abschirmung nur auf der Seite der Automatisierungssteuerung, nicht auf der Seite des Sensors, um Erdschleifen zu vermeiden.
Fallstudie aus der Praxis: Behebung von Jitter in einem holonomen Roboter
Lassen Sie mich eine anonyme Geschichte von einem Kunden erzählen, mit dem wir kürzlich zusammengearbeitet haben. Das Unternehmen stellt zentimetergroße holonome Inchworm-Roboter für die Halbleiterprüfung her. Da diese Roboter in mikroskopisch engen Räumen arbeiten, sind ihre Anforderungen an die Automatisierungssteuerung wahnsinnig hoch.
Ursprünglich wurden handelsübliche magnetische Motor-Feedback-Sensoren verwendet. Während der Tests hatten die Roboter jedoch ein schreckliches “Zittern”, wenn sie versuchten, eine statische Position zu halten. Die Magnetfelder der verschiedenen Achsen verursachten Übersprechungen. Die Motor-Feedback-Sensoren an der X-Achse nahmen magnetische Störungen vom Motor der Y-Achse auf.
Sie wandten sich an uns, und wir erkannten, dass sie die magnetische Einrichtung komplett abschaffen mussten. Wir halfen ihnen bei der Umstellung auf ein kundenspezifisches optisches Encoder-Modul für alle vier Achsen. Durch die Verwendung eines integrierten 2-DOF-Maßstabs und die Ausstattung der Empfänger mit unseren Hochgeschwindigkeits Si-PIN-Fotodioden, haben wir das magnetische Übersprechen vollständig eliminiert.
Das Ergebnis? Die neuen Motor-Feedback-Sensoren lieferten eine Messauflösung von 0,1 Mikrometern im statischen Zustand, und der Jitter der Automatisierungssteuerung verschwand vollständig. Sie waren in der Lage, eine Positionierung im Submikrometerbereich zu erreichen, ohne dass sie Kopfschmerzen hatten. Das ist die Stärke der Wahl der richtigen Motorfeedback-Sensoren.
Vergleich von Motorfeedback-Sensoren für die Automatisierungssteuerung
Wenn Sie immer noch unschlüssig sind, welche Motorfeedback-Sensoren Sie für Ihr nächstes Projekt einsetzen sollen, finden Sie hier eine kurze Übersicht.
| Merkmal/Typ | Optisches Encoder-Modul | Magnetische Drehgeber | Auflöser |
|---|---|---|---|
| Primärer Anwendungsfall | Hochpräzise Robotertechnik, CNC, präzise Automatisierungssteuerung | Schmutzige, vibrationsintensive Umgebungen, einfache AGVs | Extreme Temperaturen, schwere Industriemaschinen |
| Maximale Auflösung | Extrem hoch (oft > 10.000 PPR nativ) | Mittel (normalerweise < 2048 PPR nativ) | Niedrig bis mittel |
| Genauigkeit | Ausgezeichnet (Sub-Millimeter-Positionierung) | Gut | Mäßig |
| Anfälligkeit für Verschmutzung | Hoch (Erfordert ein abgedichtetes IP67-Gehäuse) | Niedrig | Sehr niedrig |
| Signalgeschwindigkeit/Reaktion | Ultra-schnell (insbesondere mit Si-PIN-Fotodioden) | Mäßig | Langsam (Erfordert Analog-Digital-Wandlung) |
Wie Sie sehen, ist ein optisches Encoder-Modul der klare Gewinner für Ihre Motorfeedback-Sensoren, wenn die Präzision der Automatisierungssteuerung Ihr Hauptziel ist.
Si-PIN-Photodioden-Array PDCA02-602
Die Bee Photon PDCA-Serie wurde speziell für den Einsatz in Hintergrundunterdrückung Photodiode zur Lösung komplexer Detektionsaufgaben in industriellen Umgebungen. Durch die Verwendung einer hochpräzisen Zwei-Segment-Architektur (PD A und PD B) ermöglicht dieses Gerät eine differenzielle Signalverarbeitung und filtert Hintergrundstörungen effektiv aus. Es ist die erste Wahl für Hersteller, die zuverlässige optische Schalter und Näherungssensoren mit Hintergrundausblendung entwickeln.
FAQ: Alles, was Sie sonst noch über Motorfeedback-Sensoren wissen müssen
1. Was passiert, wenn meine Motorfeedback-Sensoren nicht über eine ausreichende Auflösung verfügen?
Wenn Ihre Motorfeedback-Sensoren eine unzureichende Auflösung haben, liefern sie nicht genügend Datenpunkte an das Automatisierungssteuerungssystem. Die Steuerung wird die Position zwischen den Impulsen im Wesentlichen “erraten”. Dies führt zu rauem Motorbetrieb, hörbaren Geräuschen (Heulen) und schlechter Positioniergenauigkeit.
2. Kann ich ein optisches Drehgebermodul in einer staubigen Fabrikumgebung verwenden?
Ja, auf jeden Fall. Die internen optischen Komponenten sind zwar staubempfindlich, aber moderne industrielle Motorfeedback-Sensoren sind mit robusten Gehäusen ausgestattet. Vergewissern Sie sich einfach, dass das optische Encoder-Modul, das Sie kaufen, die Schutzklasse IP67 hat, d. h. es ist absolut staubdicht und kann sogar vorübergehend in Wasser getaucht werden.
3. Warum verlieren meine Motorfeedback-Sensoren mit der Zeit an Wert?
Der Verlust von Zählern ist fast immer ein elektrisches Problem, kein mechanisches. Dies bedeutet in der Regel, dass Ihre Motorfeedback-Sensoren elektromagnetischen Störungen (EMI) ausgesetzt sind, die entweder falsche Impulse hinzufügen oder echte Impulse verschlucken. Überprüfen Sie die Kabelabschirmung, stellen Sie sicher, dass die Erdung Ihrer Automatisierungssteuerung solide ist, und stellen Sie sicher, dass Ihre Betriebsfrequenz nicht die maximale Bandbreite des optischen Encoder-Moduls überschreitet.
Aktualisieren Sie Ihre Automatisierungssteuerung noch heute
Sie können Monate damit verbringen, die PID-Schleifen in Ihrer Automatisierungssoftware zu optimieren, aber wenn Sie das System mit schlechten Daten füttern, kämpfen Sie nur auf verlorenem Posten. Die Grundlage eines jeden zuverlässigen, hochpräzisen Robotersystems ist die physische Hardware, die die Bewegung misst.
Durch die Aufrüstung mit hochwertigen Motor-Feedback-Sensoren - insbesondere mit einem hochauflösenden optischen Encoder-Modul - erhalten Ihre Steuerungen sofort die klaren, sauberen Hochgeschwindigkeitsdaten, die sie für eine einwandfreie Leistung benötigen. Und wenn es darum geht, diese Lichtsignale ohne Verzögerung zu erfassen, geht nichts über die Leistung spezieller optischer Komponenten.
Wenn Sie es leid sind, sich mit Jitter, verlorenen Zählungen oder minderwertiger Automatisierungssteuerung herumzuschlagen, ist es an der Zeit, Ihre Motorfeedback-Sensoren aufzurüsten. Unter BeePhoton, Wir sind auf die optische Empfängertechnik spezialisiert, die diese Systeme zum Laufen bringt. Ganz gleich, ob Sie bloße Komponenten benötigen oder besprechen möchten, wie unsere Technologie in Ihre kundenspezifischen Motorfeedback-Sensoren integriert werden kann - wir sind für Sie da.
Lassen Sie nicht zu, dass schlechte Sensordaten ein großartiges Maschinendesign ruinieren. Gehen Sie zu unserem Kontaktieren Sie uns Seite oder schicken Sie uns eine E-Mail direkt an info@photo-detector.com um ein Angebot anzufordern und zu sehen, wie wir Ihre Automatisierungssysteme verbessern können.